

PhD students
Ahmad Ostovar is working with object detection in forest environments, using RGD cameras and thermo cameras.
Other crew members
Dr. Suna Bensch specializes in language technology and works with dialogue systems in the SOCRATES project, and with general NLP for social robots. Her PhD investigates parallel grammar formalisms as mathematical models for natural language.
Dr. Ola Ringdahl did his PhD in autonomous forest machines from several perspectives; feasability studies, path tracking algorithms, and path planning/obstacle avoidance. He also works with software architectures for agricultural robots.
Peter Hohnloser made his B.Sc. thesis project in the group and continues to work with ROS development in SWEEPER and is main responsible for development in the Intelligent walker project.
Michele Persiani is PhD student in the SOCRATES project project and works with machine learning for natural language processing for robots.
Maitreyee Tewari is PhD student in the SOCRATES project project and works with dialogue management and natural language processing for robots.
Neha Baranwal is postdoc financed by the Kempe foundation, and works with HRI for robots.
Alumni
Dr. Benjamin Fonooni wrote his PhD thesis about techniques for context learning with Learning from Demonstration. He used semantic network for knowledge representation and studied how generalization can be achieved by spreading activation mechanisms.
Dr. Erik Billing did his PhD developing algorithms that mimics the way the human brain learns new things. One specific application is learning from demonstration at the sensory-motor level. Erik moved on to a postdoc position at Skövde University
Mostafa Pordel wrote his Licentiate thesis on techniques for object detection image analysis and then moved on to Australia.
Funding Acknowledgement
2016 - 761 k European Commission
2014 - 20 k Promobilia foundation
2014 - 811 k European Commission
2013 - 210 k Kamprad foundation
2011 - 22 k KSLA
2010 - 11 k Innovationsbron
2010 - 782 k European Commission
2010 - 10 k Swedish savings bank foundations
2010 - 588 k European Commission
2007 - 5 k Swedish savings bank foundations
2006 - 32 k Process-IT
2005 - 400 k The Kempe Foundation
2004 -18 k Carl Tryggers Foundation
2004 - 25 k Alvis Hägglunds
2004 - 29 k LKAB
2003 - 20 k The Royal Swedish Academy of Agriculture and Forestry
2003 - 372 k VINNOVA
2002 - 300 k The Kempe Foundation
EU projects
We are coordinating the H2020 project SOCRATES (2016-2020). 15 PhD student will be employed by 7 participating universities.
We also worked in the SWEEPER, project funded by EU funded between 2015 and 2018. The goal was to develop a robot that can harvest red pepper in greenhouses.
Sweeper is a continuation of
 CROPS, another EU funded project we worked in between 2010 and 2014.
Our research tasks were sensing and perception in forest environments,
and software architectures for the harvesting robots that were developed in the project.
CROPS, another EU funded project we worked in between 2010 and 2014.
Our research tasks were sensing and perception in forest environments,
and software architectures for the harvesting robots that were developed in the project.
I coordinated INTRO, an Initial Training Network (ITN) funded by the EU as part of FP7 / Marie Curie. INTRO financed in total 8 PhD students and 2 post-docs. Here's the happy management crew before the work began:

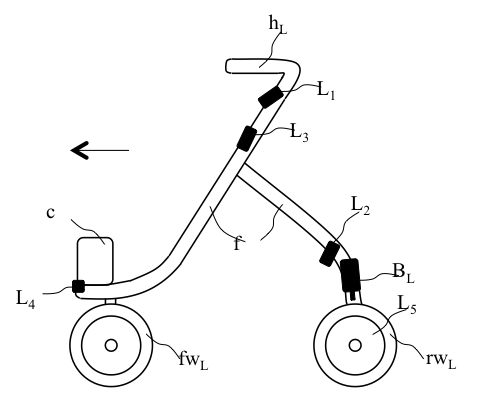
An intelligent walker
We are developing a
walking aid for people with cognitive disorders that make regular walkers hard to operate.
Our walker detects and avoids regular obstacles (e.g. door posts) and negative obstacles (e.g. curbs).
The project is financed by the Kamprad foundation and Promobilia and is run in collaboration with Umeå Stroke Center and CMTS at Norrlands University Hospital.
Press releaese
More projects can be found here.