|
An integrated system for fuel saving and top-level control of a ship's
performance. The system is operated from the central unit placed on the
bridge. The required values on speed, arrival times, and complete route plans
are input from the keyboard by the operator, normally the ship's first
officer or captain. The main engines (10-40.000 horsepower) and propellors
are then automatically adjusted to reach and maintain the required speed at
the lowest fuel consumption.
Fuel
saving is typically 5-10%, corresponding to about 1 cubic meter of heavy fuel
oil per day. The saving is achieved by two functions:
|

|
Pitch optimization
The pitch angle of the blades on a
controllable propeller acts as a kind of gear box and effects the ship's
speed together with the main engine's revolutions (rpm). The optimal combination
of pitch/rpm depends on a number of external conditions and therefore must
be subjected to dynamic optimization in order to be optimal.
|
|
|
Route
planning
The fuel consumption for a ship depends
not only on speed but also on water depth and weather conditions. The
optimal speed distribution along the route can be computed in advance if
weather forecast is available.
|
I started to develop the SeaPacer in 1985 and have been working on development,
manufacturing, and installation in the one-man company Seapacer AB ever since. Around 20 systems are now running on
ferries operated by Stena Line, TT Line, Silja Line, EstLine and others.
The product had been marketed by KaMeWa AB
and Stena Line until 1994, when I regained the marketing rights. However, the
obvious limitations of a one-man company have resulted in a rather passive
marketing the last years. The most recent installation was on MS Gotland
(Gotlandsbolagen) in the beginning of 1997.
More information about the SeaPacer system is provided in the following pages:
Route
Planning
Diagrams
Available in the System
Inputs and
Outputs
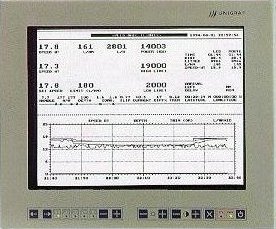
SeaPacer Main
Screen
|